How about a easy and simple tutorial on how to make a sort of security sensor using laser and a light dependent resistor?
It’s just as simple as this, the LDR reacts when it gets less light than the laser-dot in the center of it. Which is when something comes in the lasers way. So then you know when something passes the invisible line between the laser and the LDR.

Lets begin with what components you need:
1x Laser Emitter/Pen
1x LDR
1x Resistor 10k (doesn’t have to be 10k ohms)
1x Piezo Buzzer (you can use a LED or anything else you want)
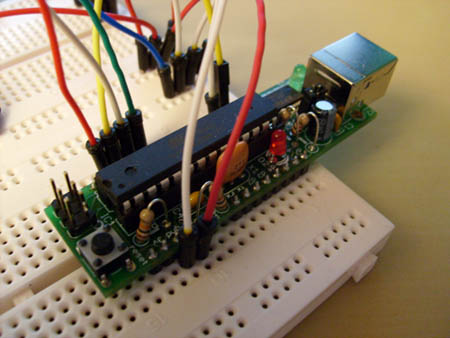
And of course a Arduino board of your choice, and some wires.
Lets wire it all up like this:

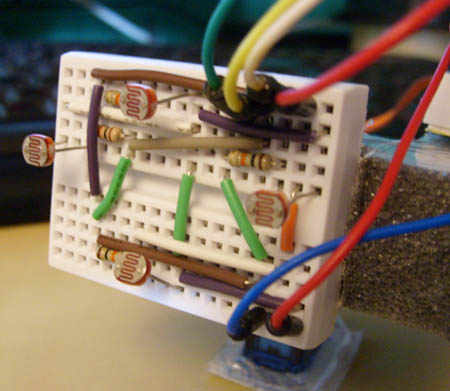
Things to notice, buzzer is grounded and the + wire is on the digital 10. Laser is just ground and +5v to make it light constantly. The LDR is in a voltage divider with a resistor, we take out the readings in the middle where the yellow wire is, and it’s attached to the analog 0.

A picture of the LDR.¨
When all this is wired up, just put this code and run it.
[youtube=http://www.youtube.com/watch?v=IzEDspdWjxU;ap=%2526fmt%3D18&w=425&h=344]